里程计线速度校准
里程距离影响导航的位姿精度,校准线速度、角速度在导航、SLAM中起到非常重要的作用。下面介绍如何校准线速度
影响线速度因素: 轮子直径、编码器精度、地面摩擦系数
校正线速度
小车的线速度是通过下位机经过运动学计算上传的线速度,首先需要启动小车控制(主控端)
roslaunch lingao_bringup bringup.launch
然后打开终端(小车主控端),执行线速度调整脚本:
rosrun lingao_bringup calibrate_linear.py
现在回到PC远程终端打开rqt
rosrun rqt_reconfigure rqt_reconfigure
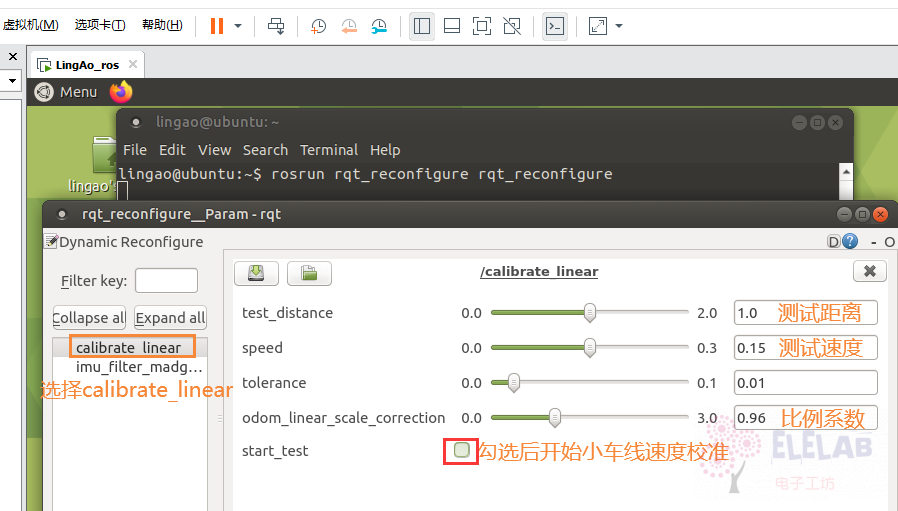
现在需要开始校准线速度是否正确,拿一把1米尺子放到轮胎中心,计算结束值,调整比例参数以达理想中的误差


– 调整方法:假如一开始值是0米,到达目标位置0.95米,(0.95/1)=0.95

将校准好的值保存到(小车主控端)配置文件上,首先进入lingao_bringup/launch/目录,编辑文件值
roscd lingao_bringup/launch/
vim lingao_base_driver.launch
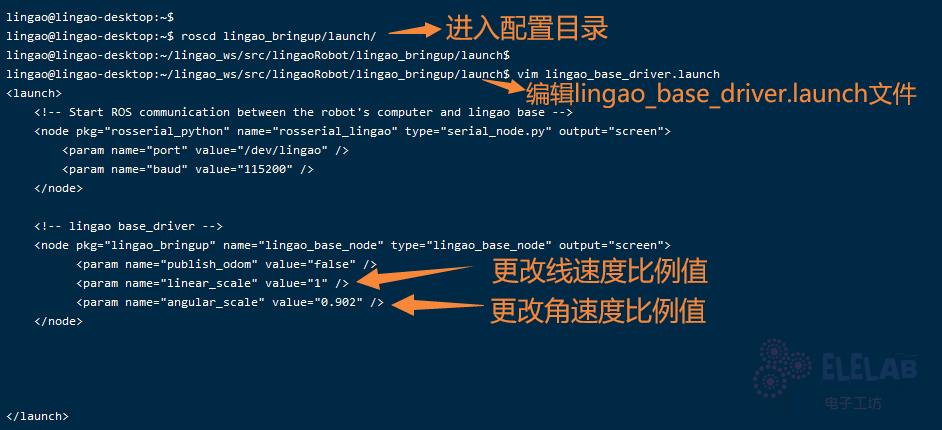

最后保存文件重启bringup生效,ROS的线速度校准完毕!