注意!该教程对应ROS套件用户
在本章节中,我们将演示深度摄像头使用。


启动摄像头
在本地端启动深度摄像头
roslaunch lingao_visual lingao_depthcamera.launch
节点启动后可看到无Error报错即可,如下图显示

注:如出现黄色警告可是摄像头不支持一些参数,正常使用
图像显示
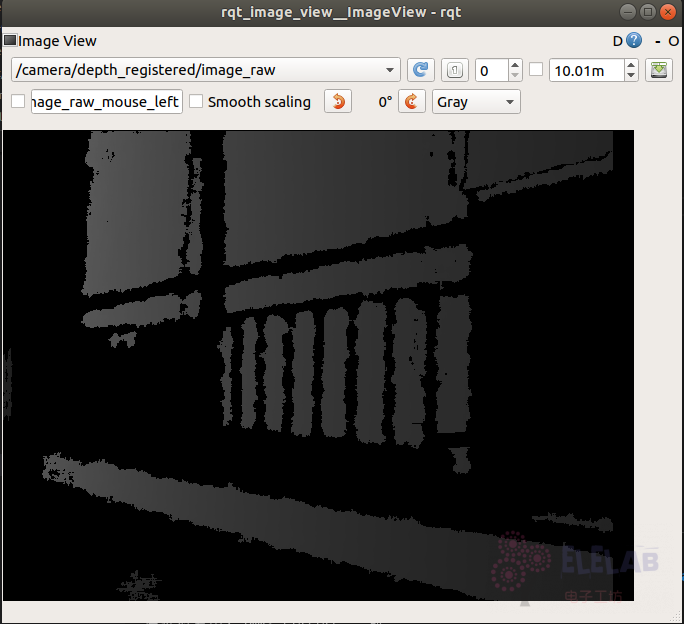
在远程端启动rqt_image_view
rosrun rqt_image_view rqt_image_view
选择图像主题即可查看图像

通过rsotopic list可看到相机发布的话题,下面截取几个重要的话题
– astra摄像头:
– 相机参数 :*/camera_info
– 原始rgb图像:/camera/rgb/image_raw
– 压缩rgb图像:/camera/rgb/image_raw/compressed
– 校准深度图像:/camera/depth/image_rect_raw
– 校准压缩深度图像:/camera/depth/image_rect_raw/compressedDepth
– 没有rgb的点云:/camera/depth/points
– xyzrgb 点云:(官方驱动问题不支持)