ROS 视觉 4 | 基于深度的跟随
注意!该教程对应ROS套件用户
在本章节中,我们将使机器人跟随演示。通过深度摄像头检测前面质心来跟随人类和机器人。
这个demo是根据深度检测兴趣范围内的质心,如在兴趣区域内检测到质心则机器人会往该质心的方向移动
启动跟随应用
- 在主控端启动灵遨基础驱动
roslaunch lingao_bringup robot.launch - 在主控端启动跟随节点与深度摄像头
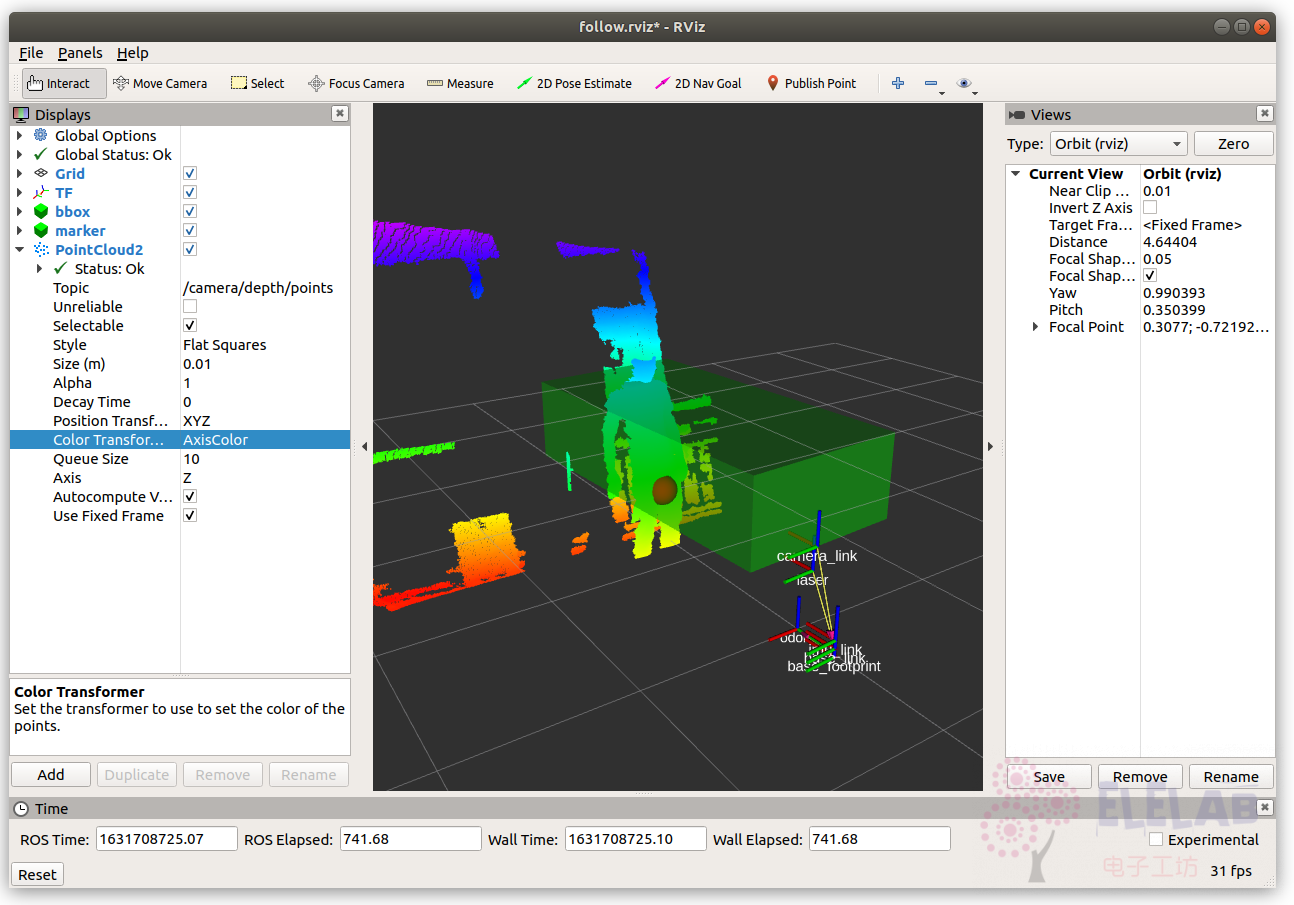
roslaunch lingao_follower lingao_depth_follower.launch - 在本地端打开rviz查看
roscd lingao_rviz/apps rviz -d depth_follow.rviz
要开始跟随,请走到机器人前面。然后,慢慢地离开机器人。机器人应该向前移动。靠近机器人会导致它后退。向左或向右缓慢移动会导致机器人转动。要停止机器人跟随,请快速远离机器人。
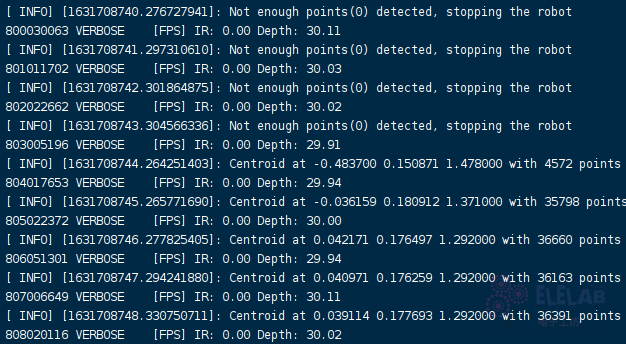
未检测到质心的时候终端显示Not enough points(0) detected, stopping the robot
检测到质心的时候会开始跟随并显示Centroid at -0.483700 0.150871 1.478000 with 4572 points消息