ROS基础 8 | 启动激光雷达 (RPLIDAR A1/A2)
启动激光雷达 (RPLIDAR A1/A2)
为了实现自主导航,要求机器人至少配备一个雷达激光传感器,以感知机器人的环境并避免途中的障碍,激光雷达有多种甚至于3D雷达,本教程基于思岚A1/A2激光雷达。
安装包已配置雷达类型你可以通过”echo $LINGAOLIDAR“命令检测你配置的雷达,思岚雷达返回”rplidar”
如果你需要使用其他雷达,则需要修改”~/.bashrc“里的LINGAOLIDAR参数,在src/lingaoRobot/lingaorobot/launch/include/lidar目录添加你的雷达配置并安装驱动
运行激光雷达
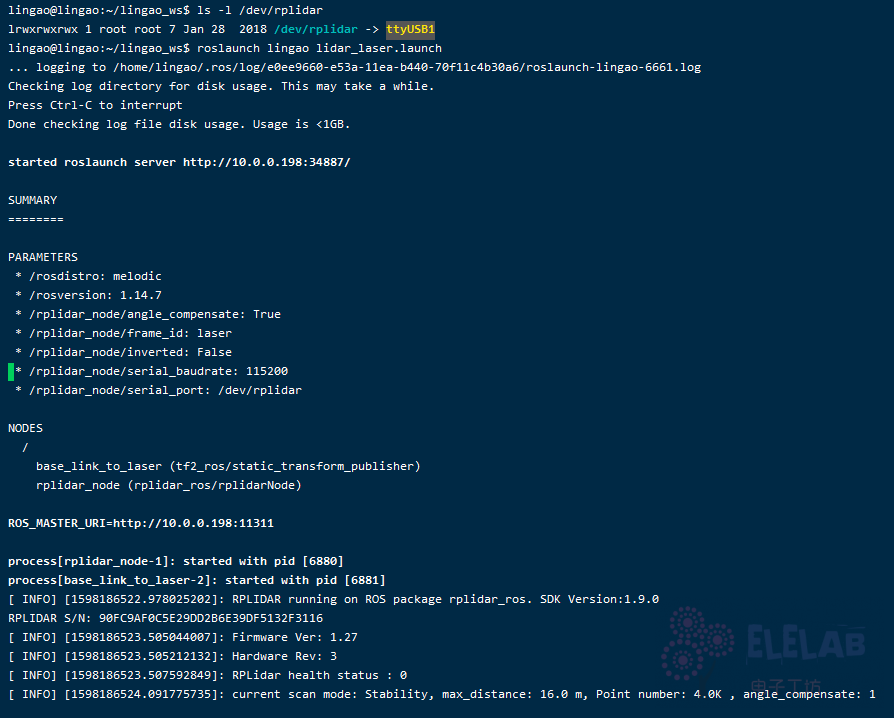
测试运行激光雷达首先查看你的端口是否正常,运行下面命令返回/dev/rplidar -> ttyUSB*即可(小车主控端ssh)
ls -l /dev/rplidar
现在开始启动rplidar(小车主控端ssh)
roslaunch lingao_bringup lidar_laser.launch
如果你的雷达供电不足可能启动不成功,下图是启动成功的示例
现在回到PC远程终端使用rivz查看扫描效果
roscd lingao_bringup/rviz/
rviz -d laser.rviz
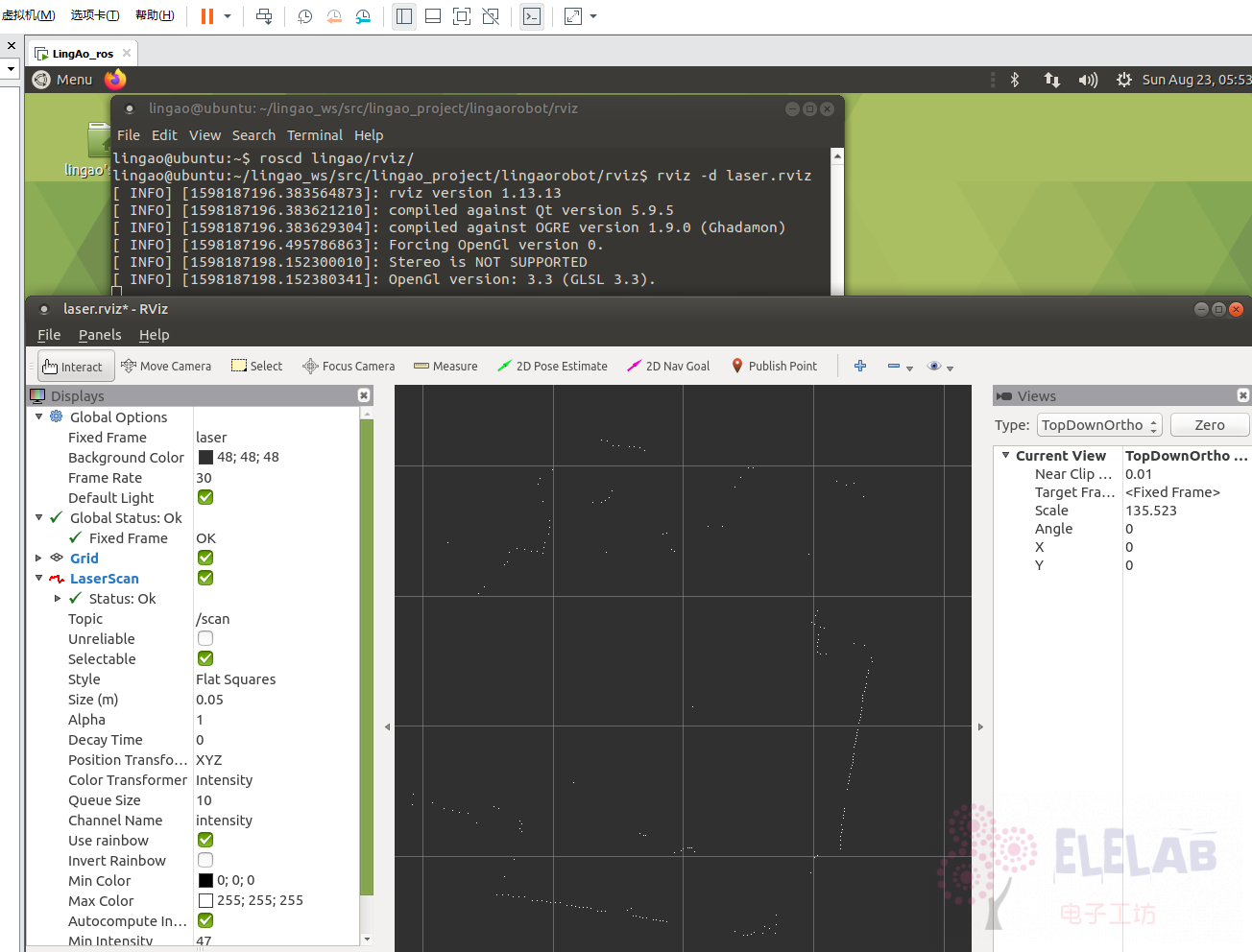
现在可以看到激光雷达运行成功,下一章介绍雷达扫图




