ROS SLAM 7 | 多点导航
注意!该教程对应ROS套件用户
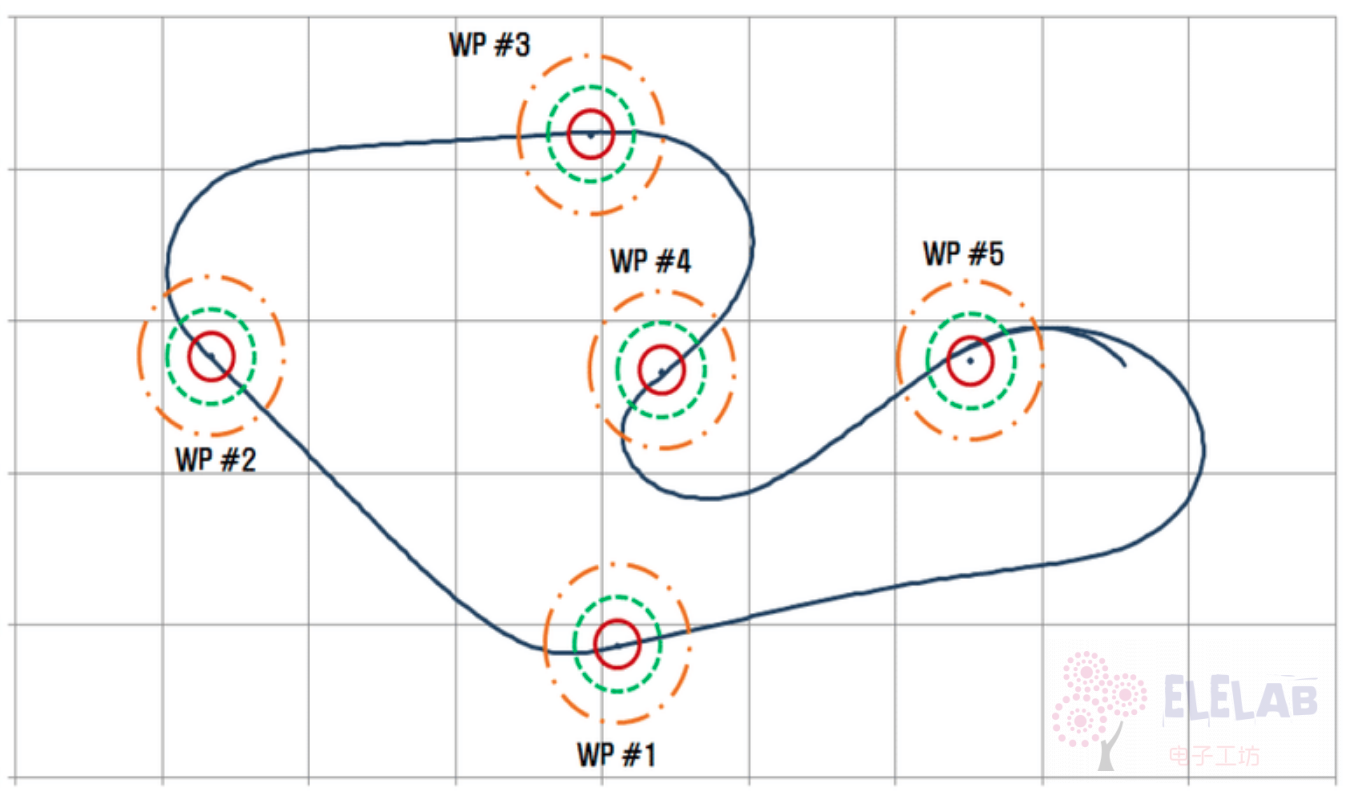
在本章节中,我们将演示ROS的多点导航,多点导航依然需要依靠move_base基础下运行。
多点导航原理思路不难,用户发送几个固定导航坐标,程序执行后发送第一个点到move_base,等待move_base完成后发送第二个坐标。
启动多点导航
- 启动基础驱动
roslaunch lingao_bringup robot.launch - 启动amcl、move_base、多点导航节点
roslaunch lingao_navigation navigate_waypoint.launch
启动后根据前面自主导航标定初始姿势位置和启动rviz
导航点导航
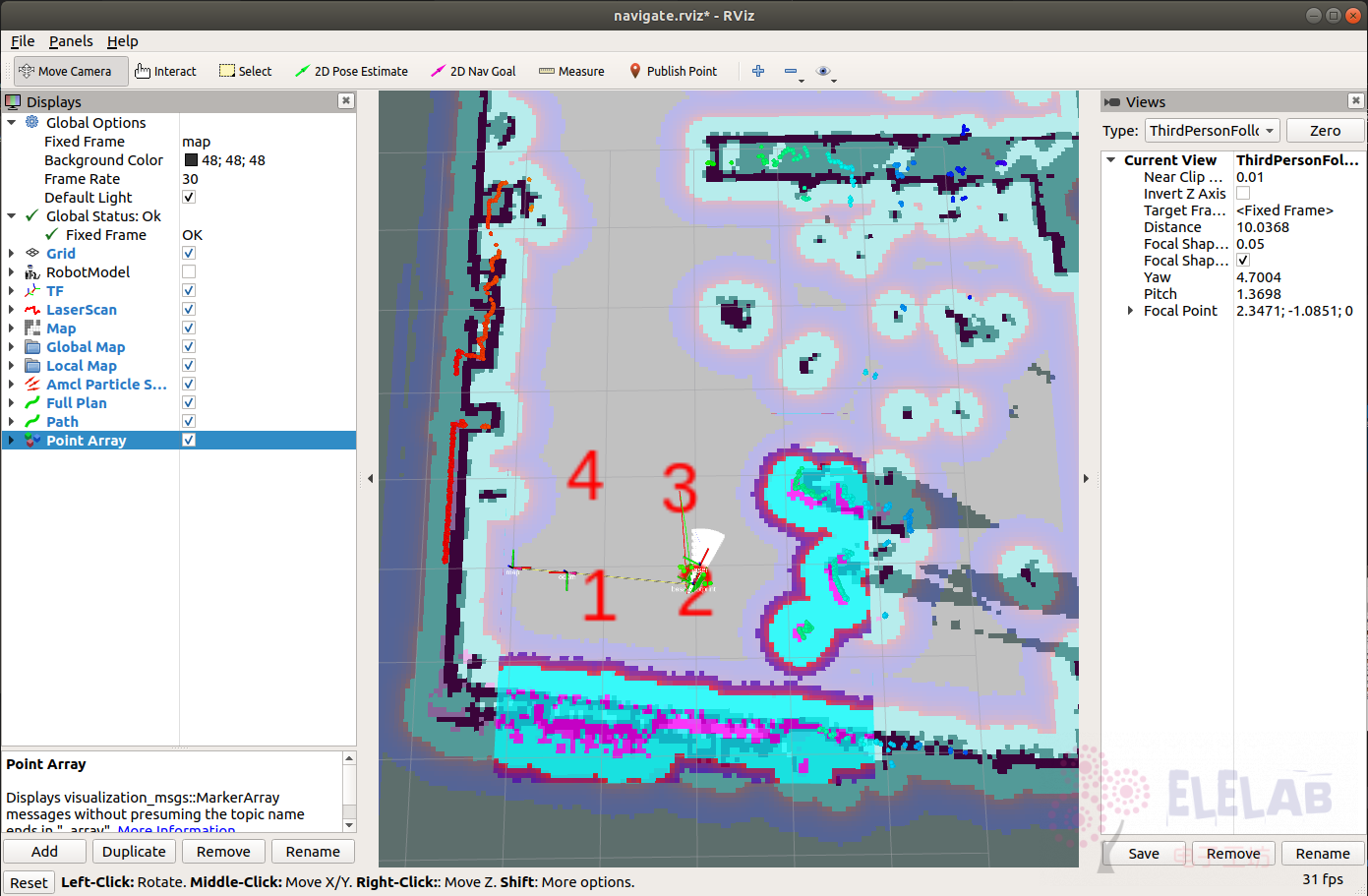
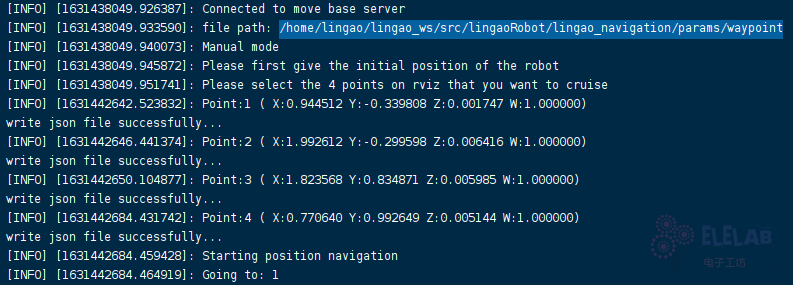
在rviz和初始姿势初始化后可通过发送Publish Point放置航点坐标
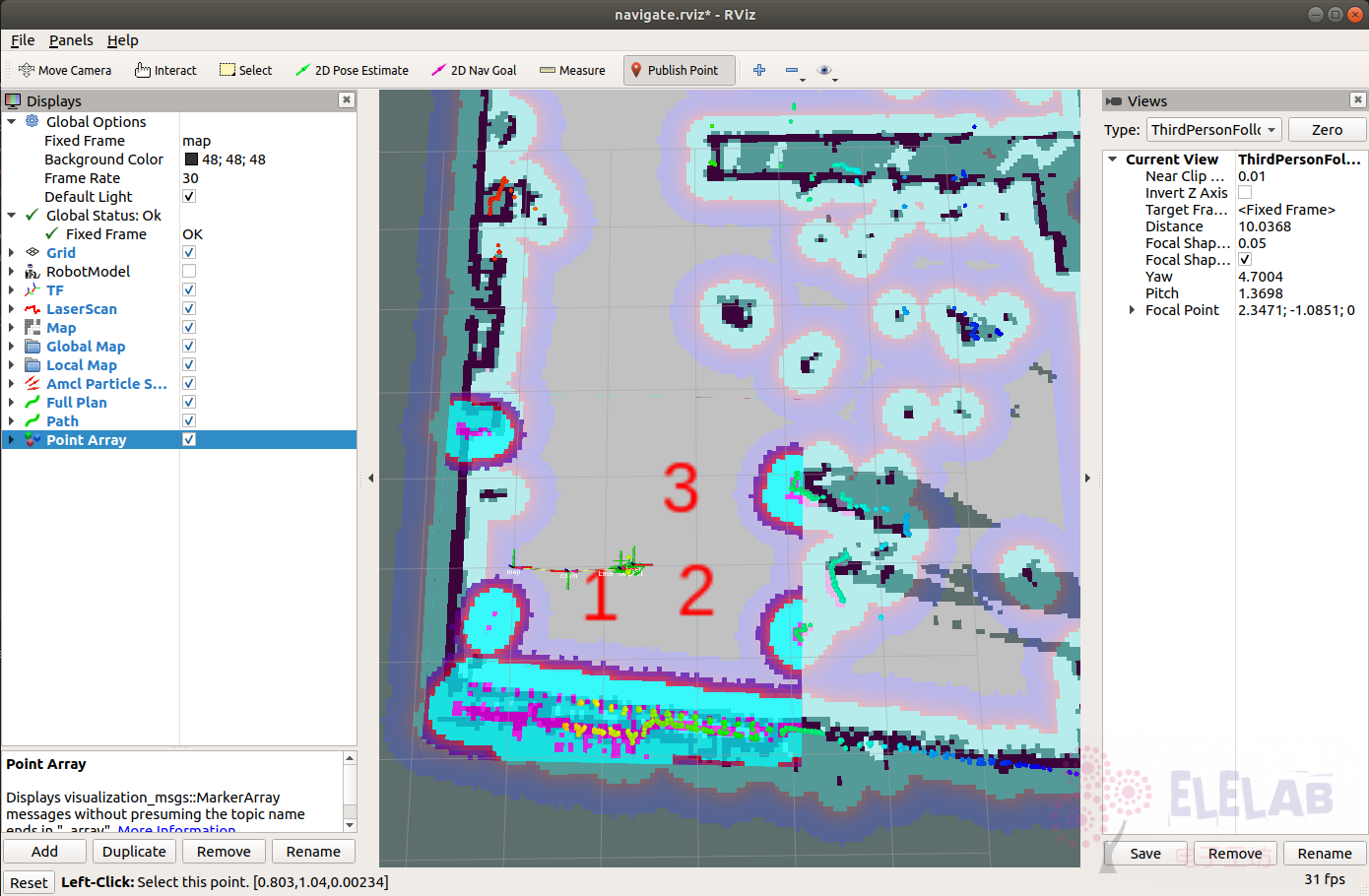
放置完4个坐标点位置后即开始逐点巡航
读取导航点文件导航
在放坐标的时候程序同时把坐标储存到json文件上,上次已放置4个坐标点,文件储存在这里:src/lingaoRobot/lingao_navigation/params/waypoint/waypoint.json
现在已经有了坐标点,载入坐标到程序开始导航
- 启动基础驱动
roslaunch lingao_bringup robot.launch - 启动amcl、move_base
roslaunch lingao_navigation navigate.launch这时候需要手动标定初始姿势位置,或者将小车放到初始建图位置再启动
-
启动多点自动导航节点
roslaunch lingao_navigation navigate_waypoint_auto.launch这时候软件会自动载入航点文件进行导航

其他使用说明
launch启动文件可设置到点停留时间、循环巡航、随机多点导航、航点数
roscd lingao_navigation/launch/
vim navigate_waypoint_auto.launch




